Este avanço tecnológico experimentado pelas montadoras de veículos tem acontecido de duas formas:
1 - Substituição de sistemas mecânicos por equivalentes eletrônicos que desempenham a mesma função como é o caso da injeção/ignição eletrônica ou o ar-condicionado eletrônico.
2 - Acréscimo de novos sistemas eletrônicos como, por exemplo, suspensão pilotada (suspensão eletrônica), imobilizador, transmissão automática eletrônica, ABS/TC, airbag, entre outros.
Assim, num veículo moderno podemos encontrar uma lista cada vez mais ampla, de funções implementadas com controle eletrônico. A figura 1 apresenta uma lista parcial. Cabe ressaltar que há no mercado veículos que possuem em torno de 30 sistemas de eletrônica embarcada (cada um com a correspondente unidade de comando) associados a mais de 100 sensores.
.jpg)
Versatilidade
Uma característica muito importante dos sistemas de eletrônica embarcada é que todos eles possuem uma unidade de comando que processa as informações enviadas pelos sensores e depois de efetuar os cálculos pertinentes, emite comandos para os atuadores. A unidade de comando é, em essência, um computador programado para desempenhar a função à qual se destina.
O fato de ser um computador programável significa que modificando o programa, o sistema pode desempenhar a mesma função de diversas maneiras.
Reforçando o conceito de versatilidade, a incorporação de sistemas eletrônicos permitiu implementar sistemas integrados, nos quais diversos sistemas de eletrônica embarcada se comunicam entre si para melhorar o desempenho do conjunto.
Assim, o sistema de controle do motor troca informações com a transmissão automática com o objetivo de melhorar as trocas de marcha. Portanto, face às necessidades de troca de informações entre módulos e de diminuição da complexidade e comprimento da cablagem, a solução surgiu com a adoção dos sistemas multiplexados.
MULTIPLEXAGEM
Nos sistemas multiplexados, os módulos trocam informações através de um par de fios que constitui o “canal de comunicação”. Todos os módulos estão conectados a esse par de fios formando uma “rede” e compartilhando o canal de comunicação. Assim, “multiplexagem” identifica uma técnica de comunicação na qual um canal de comunicação é utilizado para a troca de dados entre vários controladores conectados ao mesmo. As vantagens que podem ser mencionadas são:
- Redução do comprimento e da complexidade do chicote;
- Facilidade de diagnóstico;
- Facilidade de expansão devido a que novos módulos podem ser adicionados ao sistema sem modificações significativas na cablagem.
No entanto, o compartilhamento do canal de comunicação impõe a necessidade de estabelecer regras de acesso ao mesmo a fim de evitar conflitos que resultem na perda de informações. O conjunto de tais regras constitui o denominado “protocolo de comunicação”.
Para ilustrar os conceitos será analisado um sistema de comunicação telefônica como o da figura 2, no qual é possível a realização de teleconferência. Nela, todos os telefones compartilham um único par de fios que os interconectam e que constitui o “canal de comunicação”. A comunicação entre as partes se estabelece através de sinais sonoros, ainda que pelo canal as informações circulam na forma de sinais elétricos.
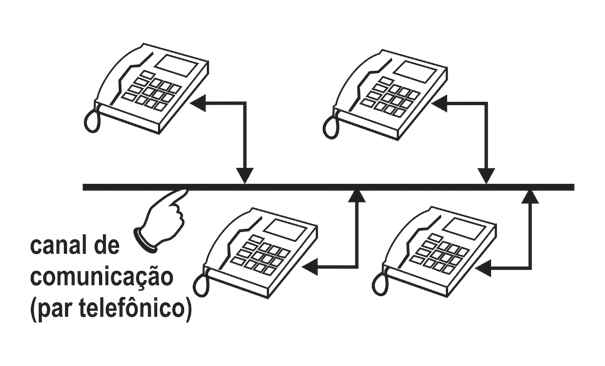
Resulta evidente que, no caso de um usuário estar usando da palavra e um outro tentar entrar na comunicação ao mesmo tempo, haverá conflito na medida em que entre eles não houver um acordo prévio de quem tem direito a falar. Ou seja, deverá existir um “protocolo” que estabeleça as regras de acesso ao canal de comunicação que sirva à organização da troca de informações.
Um protocolo básico estabelece que quando um fala, os outros devem ouvir. Caso dois ou mais tentem falar ao mesmo tempo, haverá conflito e com isto, perda de informações ou comunicação improdutiva.
Esta situação pode ser resolvida da seguinte maneira:
- Cada usuário do sistema possui um “tempo de espera em caso de conflito”; este tempo é específico para cada um.
- Em caso de conflito, ou seja, quando dois ou mais usuários começam a falar ao mesmo tempo, todos eles percebem a situação e interrompem a conversação.
- A seguir, cada um aplica o seu “tempo de espera em caso de conflito” findo o qual, verifica se o canal não está ocupado por um outro usuário; caso o canal esteja livre, começa a falar novamente com o que tinha a dizer; ou seja, assume o controle do canal de comunicação.
O procedimento acima é um dos aspectos do protocolo que deve ser estabelecido entre os usuários. Um outro aspecto diz respeito à identificação de quem fala, a quem vai dirigida a informação e o tipo da mesma.
Assim, numa teleconferência, por exemplo, pode ser estabelecida a seguinte seqüência de eventos que contribuem a “formatar” (ou seja, dar um formato inteligível) à troca de informações:
1. Antes de começar a falar, o usuário deve identificar-se.
2. Seguidamente deverá indicar, a quem (alguns ou todos) vai dirigir a informação.
3. A seguir deverá indicar o tipo de informação.
4. A continuação, inserir a informação em si.
5. Finalmente, indicar que finalizou sua fala e passar a palavra a outro participante da teleconferência.
Os passos indicados acima constituem a estrutura de cada “mensagem” trocada pelos participantes da teleconferência.
O item 4, a informação em si, é a parte que interessa, é o evento útil da mensagem. O resto constitui um “desperdício” de tempo, mas, necessário à correta transmissão da mensagem.
Pode-se dizer que, a menos do item 4, os outros passos servem para “envelopar” a informação relevante. É similar ao que é feito no envio de uma carta, em que o texto contendo a informação é colocado dentro de um envelope com o endereço do destinatário, isto, com o objetivo de que a carta chegue ao destino desejado e não a outro. Após cumprir a sua função, o envelope é descartado.
Por último, o protocolo deverá especificar algum tipo de confirmação por parte dos usuários “receptores” da informação, de que a mensagem foi corretamente recebida.
Os requisitos de protocolo apontados acima podem parecer exagerados em se tratando de poucos usuários, mas, quando o número destes aumenta, as regras acima resultam indispensáveis.
O mesmo conceito do exemplo pode ser aplicado a um conjunto de radiotransmissores que, trabalhando na mesma frequência, formam uma rede de comunicação. A situação é praticamente a mesma que aquela dos telefones. O único que muda é o canal de comunicação, que neste caso é o ar (“éter”).
Assim, pode se disser que um sistema multiplexado difere somente na linguagem utilizada para a transmissão da informação. Num sistema multiplexado automotivo, a comunicação se estabelece através de sinais elétricos e não sonoros.
As redes automotivas multiplexadas baseiam seu funcionamento na comunicação serial. O canal de comunicação é constituído por fios condutores ou, mais recentemente, por fibra ótica. O canal é “bidirecional”, ou seja, o par de fios serve tanto para transmitir como para receber os dados. Como consequência disto, os módulos deverão respeitar algum tipo de protocolo de forma similar àquela dos exemplos apresentados acima.
Protocolo de Comunicação e Codificação/Sinalização - Estes conceitos são de suma importância em todo sistema de comunicação, em especial, na comunicação serial. Como mencionado, o protocolo de comunicação é um conjunto de regras que devem ser obedecidas por todos os que estão conectados ao canal, sejam eles pessoas ou módulos eletrônicos.
- O protocolo diz respeito à formatação das mensagens que são trocadas pelos participantes, do significado das mesmas, das prioridades e das regras de verificação para avaliar a sua integridade.
- A codificação/sinalização diz respeito à forma em que as mensagens são codificadas digitalmente e enviadas através do canal de comunicação que, no caso das redes automotivas, são sinais elétricos pulsados com dois níveis de tensão: 0 e 5V, por exemplo. Nas redes de fibra ótica o sinal é luminoso de 2 níveis.
A informação a ser transmitida é digitalizada e armazenada na memória do módulo na forma de palavras binárias, ou seja, valores codificados em binário na forma de zeros e uns. A digitalização dos sinais analógicos dos sensores é feita por conversores (analógico/digital) internos à unidade de comando.
As palavras estão formadas por conjuntos de 8 dígitos binários (bits), com níveis lógicos “0” e “1”, que representam os valores digitalizados de sinais analógicos e os códigos de formatação do protocolo.
Os conceitos acima serão aplicados a um exemplo de comunicação serial entre a unidade de comando ABS e a da transmissão (TCM).
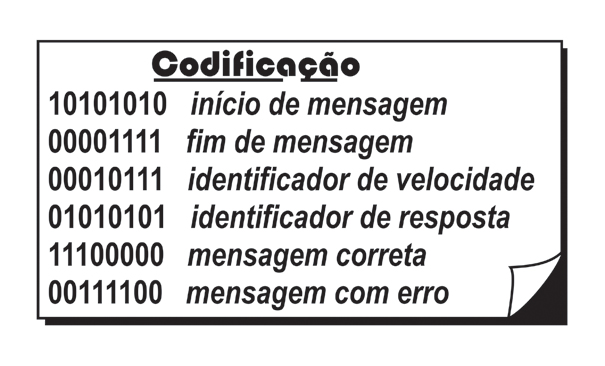
A figura 3a apresenta alguns dos códigos binários de formatação de mensagens utilizados no protocolo. Com o intuito de simplificar o exemplo, foi definido só um identificador, o correspondente à velocidade do veículo. Numa aplicação real, a quantidade de identificadores é bem maior e corresponde ao número de variáveis diferentes (pressão, temperatura, posição, velocidade, etc.) que são transmitidas na rede.
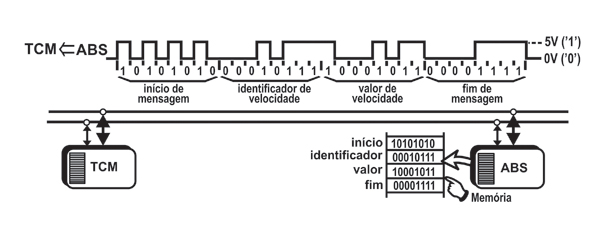
No exemplo da figura 3b, a unidade ABS disponibiliza no canal o valor de velocidade do veículo que pode ser recuperado por todas as unidades conectadas ao mesmo. Com o objetivo de ilustrar a funcionalidade de forma simplificada, o exemplo só mostra a unidade TCM que utiliza o referido valor (entre outros) para determinar o momento de troca de marchas.
Funcionamento
O exemplo supõe que a unidade ABS envia uma mensagem, com o valor de uma variável, a cada segundo, e espera receber uma resposta (não apresentada no exemplo) contendo a indicação de como foi recebida a mensagem.
A figura 3b mostra como a mensagem é preparada na memória da unidade ABS para ser transmitida através do sinal pulsado (serial) que percorre o canal e que representa a mensagem. No exemplo, a mensagem possui somente, 4 campos, sendo que na aplicação prática no veículo, os protocolos acrescentam os campos de sincronização, no início da mensagem, e de verificação, no fim da mesma.
O exemplo salienta, ainda, o tempo que demanda a transmissão de 1 bit que é, neste caso, de 1ms. Assim, a velocidade de transmissão no exemplo resulta 1000 bits/segundo equivalente a 1 kilobit por segundo (1 Kbps). Nas redes CAN automotivas utilizadas em sistemas OBDII, a velocidade de transmissão é de 250 Kbps (Diesel) ou 500 Kbps (Otto).
Redes Multiplexadas
No momento as redes mais difundidas são: CAN, MOST (fibra ótica), FlexRay, VAN (similar à rede CAN; utilizada em veículos Peugeot/Citroën). A seguir, e para ilustrar as estratégias de diagnóstico em redes multiplexadas, será utilizada a configuração da rede CAN/VAN.
Diagnóstico em Sistemas Multiplexados
Em função da configuração da rede se apresentam duas possibilidades:
1.Rede única (figura 4a): As unidades de comando dos diversos subsistemas eletrônicos estão interligadas por um único canal de comunicação. O scanner, através do conector de diagnóstico, tem acesso direto à rede e, portanto, o protocolo utilizado para se comunicar deve ser idêntico àquele utilizado pelas unidades de comando.

2.Redes múltiplas (figura 4b): As unidades de comando dos diversos subsistemas eletrônicos estão interligadas por duas ou mais redes internas, através das quais trocam as informações necessárias ao seu funcionamento.
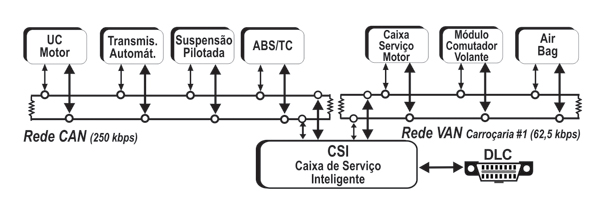
O exemplo da figura 4b corresponde a uma parte da rede multiplexada utilizada em veículos Citroën.
Esta configuração é a tendência atual em função do aumento e diversidade de sistemas eletrônicos instalados no veículo.
O scanner está ligado a um circuito eletrônico de gerenciamento ou adaptação de protocolos, instalado entre o conector de diagnóstico e a(s) rede(s) multiplexada(s). Além de permitir a comunicação com o equipamento de teste, o adaptador de protocolos gerencia a troca de mensagens entre as diversas redes.
Este circuito, denominado de “gateway” (do inglês, “ponte de ligação”) isola o scanner da(s) rede(s). Nesta configuração, portanto, o protocolo utilizado na comunicação com o equipamento de teste pode ser diferente daquele da(s) rede(s). O adaptador funciona como um “tradutor” de protocolo que encaminha a solicitação vinda do scanner, para a rede onde se encontra a UC com a qual se deseja estabelecer a comunicação.
Nota: O resistor R, instalado nos extremos do par de fios serve para eliminar a reflexão do sinal pulsado, o que provocaria interferência e perda de informação.
Rede MOST
A rede MOST é utilizada para o transporte de dados orientados à mídia, ou seja, trata-se de um canal serial para a transferência de sinais de áudio, vídeo, voz e telemática através de fibra óptica no qual a velocidade de transmissão pode variar entre 20 Mbps e 150 Mbps.
Uma característica importante a ser mencionada é que as ondas de luz que transportam a informação digital não geram nem são suscetíveis a interferência eletromagnética e, ao mesmo tempo, permitem uma alta taxa de transferência de dados em comparação com as redes CAN e FlexRay, por exemplo.
A rede adota a configuração em anel, onde cada unidade transmite os dados recebidos na mensagem para a próxima unidade no anel. Este processo continua até que a mensagem retorna à unidade que a originou.
A figura 5 é um exemplo simplificado de rede MOST. Nela, 2 unidades de controle são obrigatórias: a unidade mestre e a ponte de ligação (“gateway”)/diagnóstico.
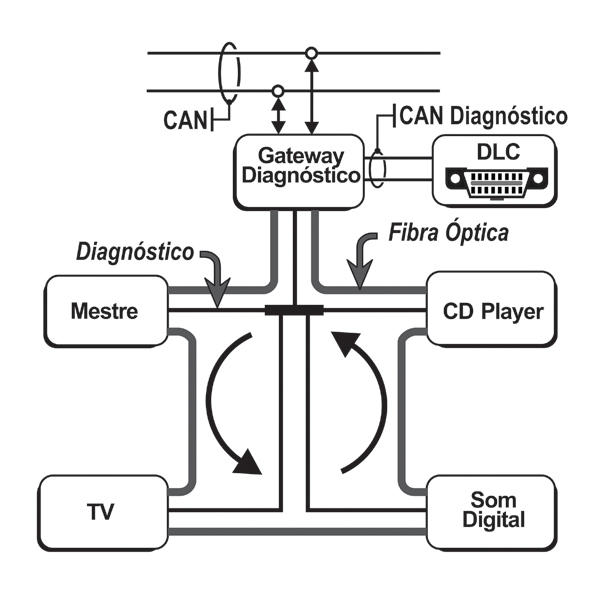
- Mestre. É o nó gestor da rede. São suas funções: 1) geração das mensagens, 2) controle do estado da rede verificando a integridade das mensagens após estas terem circulado pela rede e retornado, e 3) gerenciar a capacidade de transmissão em função da quantidade de dados alocada a cada nó em cada mensagem.
- Gateway/Diagnóstico. Responsável pelo diagnóstico da rede através de um canal de diagnóstico dedicado, com configuração estrela, e da comunicação com o equipamento de teste através da rede CAN Diagnóstico.
Rede FlexRay
É uma rede “multimaster”, similar à rede CAN, de alta velocidade, tolerante a falhas e determinística. São suas principais características:
- Alta velocidade. Até 10 Mbps. Lembrar que a rede CAN pode atingir 1 Mbps.
- Tolerância a falhas. A comunicação serial pode ser feita através de 2 canais de par trançado, pelos quais circula a mesma mensagem; ou seja, existe redundância na comunicação o que propicia uma maior tolerância a falhas.
- Determinismo. A cada unidade conectada à rede é alocado um instante específico para ocupar o canal. Isto evita conflitos no uso do canal e permite que o instante em que a mensagem chega ao destino seja determinado. Esta é uma característica importante nos casos de controle eletrônico em sistemas críticos de segurança denominados “x by wire” ou “x por fio” tais como acelerador eletrônico e direção dinâmica.
Configurações
As figuras 6a, 6b e 6c apresentam as possíveis configurações que pode assumir uma rede FlexRay.

- A configuração em “barramento” é similar àquela de uma rede CAN/VAN.
- A configuração em “estrela” apresenta a característica de que o nó central 1 é ativo, ou seja, tem por função servir de “ponte de ligação” (“gateway”) da rede. Isto, além da sua função específica de controle dos dispositivos a ele conectados.
- A configuração “híbrida” resulta da combinação das duas anteriores: “barramento” e “estrela”. O nó 2 cumpre função similar ao nó 1 da configuração “estrela”.