Estes componentes são utilizados principalmente em aplicações que requerem níveis de precisão elevados como em sistemas de acelerador eletrônico e transmissões automatizadas.
Efeito Hall - Principio
Quando uma corrente de valor ib circula por uma pequena pastilha de material semicondutor, imerso num campo magnético de fluxo B, aparece uma voltagem Vh no sentido perpendicular ao da corrente e ao do fluxo magnético.
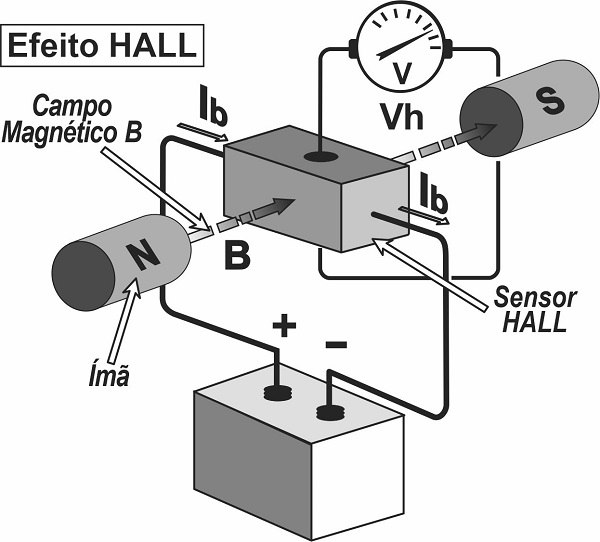
Se a corrente ib é mantida constante, a tensão Vh gerada depende do fluxo magnético B que resulta máximo quando incide perpendicularmente ao sentido da corrente ib e mínimo (nulo) quando paralelo.
A tensão depende também da proximidade do ímã com relação à pastilha. Como resultado, toda variação de fluxo magnético provoca variação na tensão gerada. Um aumento do fluxo magnético provoca o aumento da tensão gerada.
Assim, o sensor de efeito HALL varia sua saída em resposta a um câmbio do campo magnético com o qual interage. Esta propriedade é utilizada na construção de sensores: de rotação, de deslocamento linear e de posição angular.
Sensor de Posição Angular
Verifica-se que, posicionando um sensor HALL próximo de um ímã solidário a um dispositivo que se movimenta, é possível medir uma tensão proporcional à distância que separa o dispositivo do sensor ou à orientação (ângulo) do dispositivo com relação ao sensor.
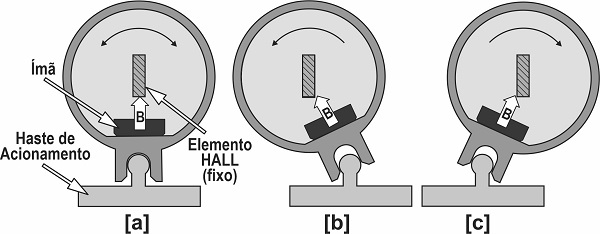
A análise do funcionamento como sensor de posição angular é feita utilizando a figura 2.

- Nas figuras 2a e 2c o fluxo resulta paralelo ao sentido da corrente, pelo que a tensão gerada é nula.
- Nas figuras 2b e 2d o fluxo é perpendicular ao sentido da corrente, pelo que a tensão gerada é máxima; positiva no caso da
figura 2b e negativa na 2d.
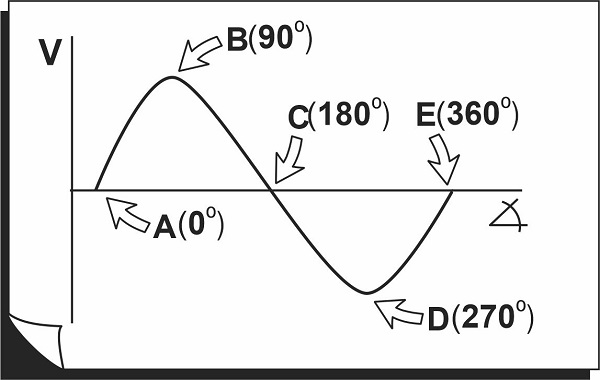
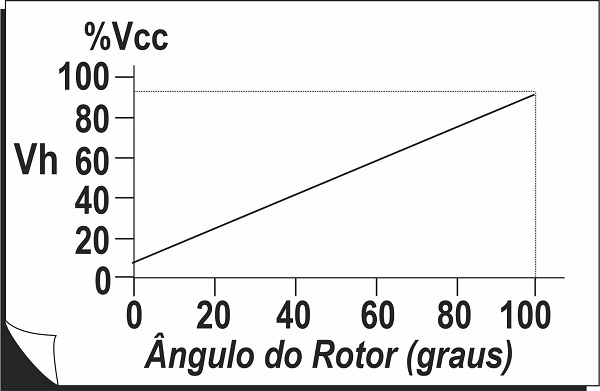
- A figura 3 apresenta a onda de tensão em função da posição angular do ímã.
A figura 4 apresenta a aplicação prática dos conceitos acima, na construção de um sensor de deslocamento angular.
O ímã e o rotor com o disco magnético giram movimentados pela haste de acionamento do dispositivo mecânico cuja posição se deseja determinar. O sensor Hall permanece fixo, pelo que a tensão gerada dependerá da posição angular do ímã com relação à do sensor.
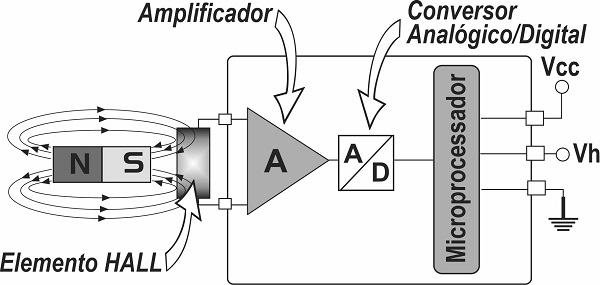
A figura 5 apresenta o esquemático do sensor com o elemento Hall de sensoriamento associado ao circuito eletrônico (montado dentro do sensor) que processa e condiciona o sinal do mesmo.
O sinal de tensão do elemento Hall é amplificado pelo amplificador A e digitalizado pelo conversor analógico/digital.
A seguir, o sinal digitalizado é processado pelo microprocessador que, como resultado, fornece o sinal Vh de saída como mostrado no gráfico da figura 6. Esta configuração apresenta uma variação de tensão quase linear para ângulos compreendidos entre +/-45O da posição de campo magnético paralelo ao elemento Hall. Nos sensores atuais tanto o amplificador como o conversor estão integrados no próprio microprocessador.
Os pontos críticos desta configuração são:
- Alta sensibilidade a campos magnéticos externos com efeitos não desejados.
- Alta sensibilidade à posição do sensor com relação ao ímã, o que impõe tolerâncias de montagem mínimas.
- A intensidade do campo magnético gerado pelo ímã é dependente da temperatura, pelo que mudanças nesta resultam em variações indesejadas da tensão de saída, o que afeta a precisão do sensor.
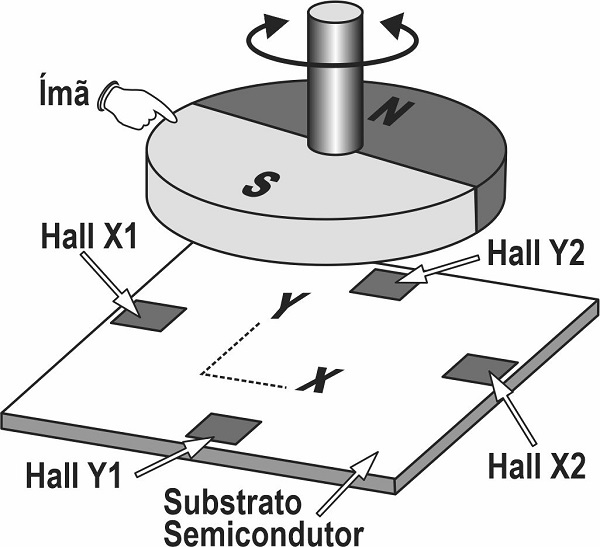
Para medição de ângulos maiores, até 360 graus e que elimina os pontos críticos apontados no item anterior, é utilizada a configuração da figura 7. O sensor consiste num substrato semicondutor no qual estão integrados 4 elementos Hall posicionados dois a dois diametralmente opostos nos eixos X e Y. Como indicado na figura, por sobre os elementos Hall, um disco diametralmente magnetizado é solidário ao eixo cujo ângulo se deseja medir.
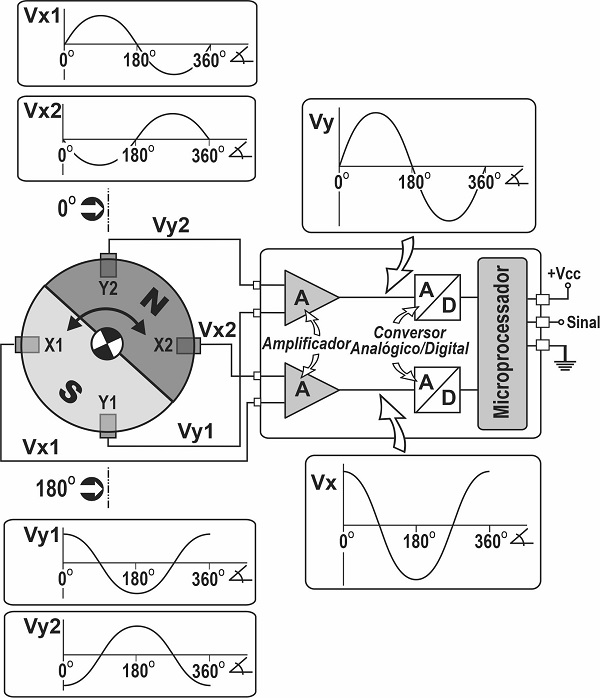
A figura 8 apresenta o esquemático com o circuito eletrônico (integrado no próprio sensor) que condiciona os sinais gerados pelos elementos Hall.
Ao girar o disco magnetizado, a tensão de cada elemento Hall varia em função da posição do disco assumindo valores segundo as curvas dos gráficos de Vx1, Vx2, Vy1 e Vy2. Os amplificadores realizam, ponto a ponto, a soma das tensões e a sua amplificação, gerando as tensões Vy e Vx
Estes sinais analógicos são digitalizados pelos conversores para serem processados pelo microprocessador aplicando uma fórmula matemática através da qual o valor do ângulo calculado independe do valor de tensão dos elementos Hall. Como resultado, é eliminada a interferência da temperatura que, como salientado no item anterior, provoca variações indesejadas na tensão gerada pelos elementos Hall.
Com o valor assim calculado, o microprocessador gera o sinal de saída do sensor que pode ser:
- Um sinal analógico de tensão que varia linearmente em função do ângulo girado.
- Um sinal de ciclo de trabalho variável (PWM) cujo ciclo de trabalho é em função da posição do sensor.
Sensor de Posição Linear
Verifica-se que, posicionando um sensor HALL próximo de um ímã solidário a um dispositivo que se movimenta, é possível medir uma tensão proporcional à distância que separa o dispositivo do sensor ou à orientação (ângulo) do dispositivo com relação ao sensor.

A análise do funcionamento como sensor de posição linear é feita utilizando a figura 9. Geralmente, nestes sensores, o elemento Hall é fixo e o ímã, solidário ao dispositivo cuja posição (deslocamento linear) se deseja determinar.
- Na figura 9a o ímã está deslocado para a esquerda de forma que o campo magnético B incide no elemento Hall segundo a orientação da seta. Como resultado, a tensão Vh é máxima positiva.
- Na figura 9b o ímã está na posição intermediária de forma que o campo magnético B resulta paralelo ao elemento Hall. Como resultado, a tensão Vh é nula.
- Na figura 9c o ímã está deslocado para a direita de forma que o campo magnético B incide no elemento Hall segundo a orientação da seta. Como resultado, a tensão Vh é máxima negativa.
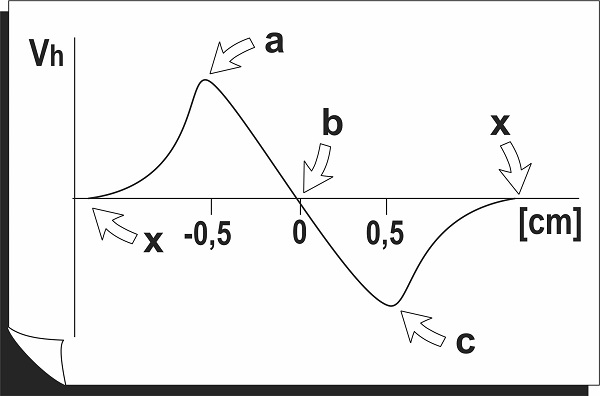
A figura 10 apresenta o gráfico com a onda de tensão Vh gerada pelo elemento Hall, em função da posição relativa do ímã. O exemplo corresponde ao caso de um ímã de 1 cm de comprimento.
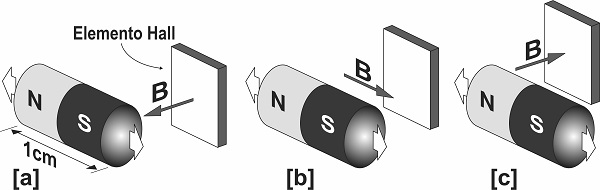
- Na figura 11a o ímã está deslocado para a direita com o pólo S na frente do elemento Hall, com o que o campo magnético B incide perpendicularmente ao plano do elemento e com o sentido que gera a máxima tensão Vh positiva. (ponto [a] na figura 10)
- Na figura 11b o ímã está posicionado de forma que os pólos resultam eqüidistantes do elemento Hall. Com isto, o campo magnético B resulta paralelo ao plano do elemento. Como resultado, a tensão Vh é nula. (ponto [b] na figura 10)
- Na figura 11c o ímã está deslocado para a esquerda com o pólo N na frente do elemento Hall, com o que o campo magnético B incide perpendicularmente ao plano do elemento e com o sentido que gera a máxima tensão Vh negativa. (ponto [c] na figura 10).
Reparar que nas situações em que o ímã se desloca além das posições [a] e [b] (tensões máximas) a tensão Vh diminui até se anular (pontos [x]). Isto é resultado da diminuição da intensidade de campo magnético percebida pelo elemento Hall.
Observar, também, a linearidade da onda de tensão para posições entre os pontos máximos, o que define o intervalo de deslocamento mais apropriado para detecção de deslocamento. Ou seja, onde a informação do sensor é precisa. Reparar que este intervalo é aproximadamente, igual ao comprimento do ímã. No caso do exemplo, +/-0,5 cm de deslocamento da posição central do ímã com relação ao elemento Hall. Assim, para a correta detecção de deslocamentos maiores deve aumentar-se o comprimento do ímã.
Sensor de Rotação
As figuras apresentam a aplicação do efeito Hall em sensores de rotação.
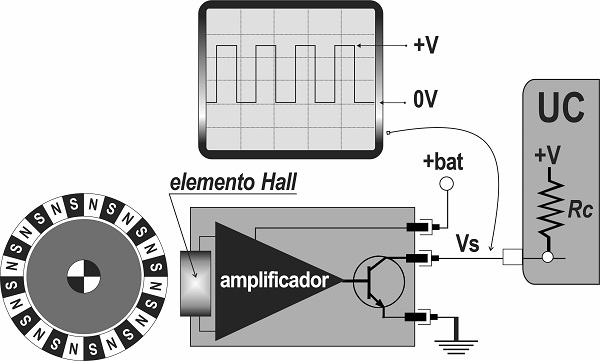
Na figura 12 o anel imantado é solidário ao eixo cuja rotação se deseja medir. Assim que o eixo gira, a alternância de polaridade N-S provoca a inversão do sentido do fluxo magnético e com isto, a variação da tensão gerada pelo elemento Hall a qual, processada pelo amplificador e circuito eletrônico associado, resulta no sinal de saída Vs.
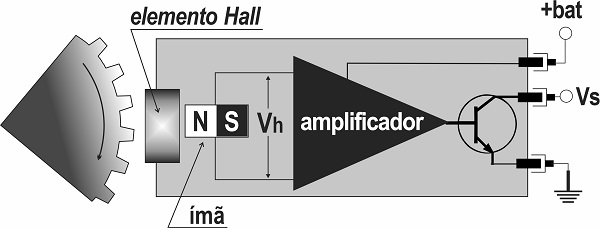
Na figura 13 o elemento Hall, posicionado entre a roda fônica e o ímã (interno ao sensor), forma com estes um circuito magnético. Nesta configuração, o campo magnético permanentemente atravessa o elemento Hall que gera assim uma tensão Vh mínima. A passagem de um dente na frente do elemento provoca a variação de relutância do circuito magnético, que intensifica o campo que atravessa o elemento. Como resultado, a tensão Vh aumenta. Processando a tensão Vh, o amplificador e circuito eletrônico associado geram o sinal de saída Vs como mostrado na figura 12.
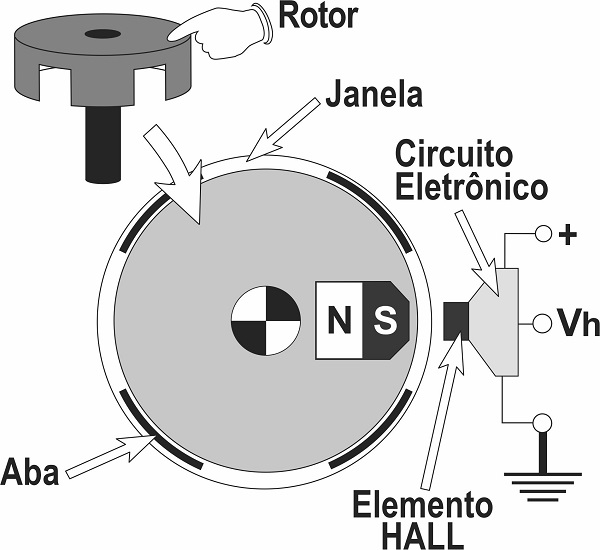
A figura 14 apresenta o caso do sensor de rotação utilizado em sistemas de ignição com distribuidor (veículos da Autolatina, por exemplo). Nesta configuração, ao girar, o rotor de material ferromagnético interpõe uma aba ou uma janela entre o ímã e o elemento Hall.
- A presença de uma janela permite que o campo magnético incida perpendicularmente no elemento Hall, o que gera a tensão Vh.
- A presença de uma aba, pelo contrário, bloqueia o campo magnético, pelo que a tensão Vh resulta nula.
Um circuito eletrônico, similar àqueles das figuras 12 e 13, processa a tensão Vh gerando o sinal pulsado de saída como mostra a figura 12.