Os sistemas ABS podem ser classificados segundo o número de canais, configuração adotada e tipo de ação.
1.Nível de controle que oferecem. O número de rodas controladas individualmente é denominado de "canal". Assim, podem ser encontrados no mercado, sistemas de 1, 2, 3 ou 4 canais.
Sistemas de 1 canal: Nestes, o controle ABS é realizado sobre 2 rodas simultaneamente; geralmente, as traseiras. Foi aplicado inicialmente, nos veículos leves de carga (pick-ups).
Sistemas de 2 canais: Atuam sobre duas rodas de forma independente. Possuem um sensor de velocidade para cada roda.
Sistemas de 3 canais: Atuam, individualmente, sobre duas rodas (geralmente, as dianteiras) e simultaneamente sobre as outras duas (as traseiras). Possuem um sensor para cada roda controlada de forma independente e um ou dois sensores para as rodas controladas simultaneamente.
Sistemas de 4 canais: Atuam individualmente, sobre as 4 rodas. Possuem sensores individuais para cada roda.
2.Tipo de ação. Segundo este critério, podem ser classificados em: ABS passivo e ABS ativo.
ABS passivo. Regula a pressão aplicada aos elementos de frenagem (pastilhas, lonas) a partir da força gerada pelo condutor através do pedal.
ABS ativo. Além da funcionalidade do ABS passivo, pode gerar pressão de frenagem independentemente da ação do condutor. Esta característica é necessária nos sistemas de controle de tração e de estabilidade, razões pelas quais todos os sistemas modernos são deste tipo.
3.Capacidade de autodiagnóstico. Segundo este critério podem ser classificados em analógicos (os primeiros sistemas), sem capacidade de autodiagnóstico, e digitais (todos os atuais) com capacidade de autodiagnóstico através de scanner.
Nota:Levando em consideração sistemas ABS mais antigos, podem ser classificados em sistemas integrados e sistemas não-integrados.
Sistemas Integrados: Combinam o cilindro mestre, um amplificador de força hidráulico e a unidade hidráulica do ABS, num único conjunto. Para a geração da pressão é utilizado, geralmente, um amplificador de força constituído por uma bomba acionada por motor elétrico controlado pela unidade de comando eletrônico.
Sistemas Não-Integrados: Nestes, o cilindro mestre e a unidade hidráulica ABS estão separadas e o amplificador de força pode ser acionado pelo vácuo do coletor (sistema hidrovácuo) ou por uma bomba instalada na unidade eletro-hidráulica.
ABS Passivo Funcionamento Básico
O sistema ABS regula ("modula") a pressão hidráulica aplicada aos freios. Isto, com uma estratégia passiva, já que a unidade de controle ABS somente consegue diminuir a pressão gerada pelo cilindro mestre e não, aumentá-la. Assim, durante as frenagens normais, todo sistema ABS opera como um sistema de freios convencional.
A seqüência de eventos durante uma frenagem é a seguinte:
Os sensores de rotação, instalados nos cubos das rodas, enviam o sinal pulsado para a UC ABS.
A UC realiza o monitoramento da velocidade das rodas comparando-as entre si. Quando detecta discrepâncias nas velocidades angulares, que indiquem a iminência de bloqueio de uma ou mais rodas, a UC inicia a ação ABS.
A ação ABS consiste em diminuir e aumentar ("modulação") a pressão hidráulica aplicada à (s) roda (s) que apresentem tendência ao bloqueio.
O controle da pressão é feito pela UC, através de um conjunto de válvulas solenoides que constituem a unidade eletro-hidráulica.
Ação do ABS
A análise a seguir será feita considerando o comportamento de uma roda de um sistema de 4 canais. Isto, porque o sistema ABS atua "modulando" a pressão aplicada, de forma individual.
A ação do ABS se processa em 3 fases, simultaneamente com o monitoramento da velocidade de rotação das rodas.
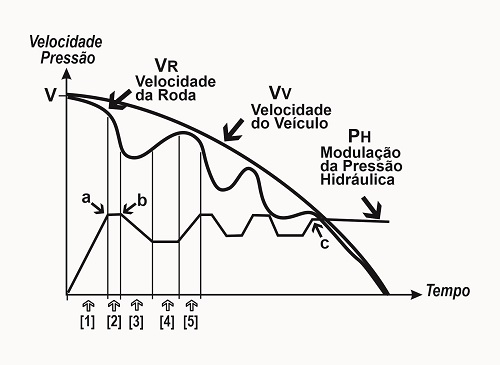
O gráfico de figura acima mostra, no tempo, como variam: A velocidade tangencial da roda VR, a pressão hidráulica aplicada PH e a velocidade do veículo VV.
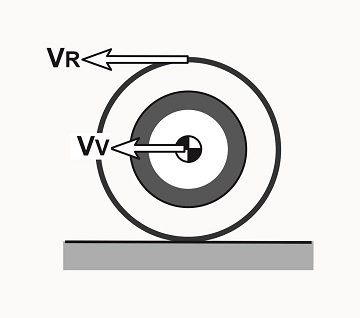 Fase [1]: É a fase de aumento de pressão. O veículo e a roda se deslocam com a mesma velocidade V (tempo 0) quando é aplicado o freio. A pressão aumenta linearmente até o ponto [a]. Ao mesmo tempo, a velocidade da roda (VR) diminui mais rapidamente que a do veículo (Vv). Fase [2]: É a fase de manutenção da pressão. O sistema ABS entra em ação isolando a roda do resto do circuito hidráulico, evitando, assim, que a pressão aumente. Como resultado, a velocidade da roda tende a se estabilizar, mas, afastada ainda, daquela do veículo (ponto [b]). Esta diferença de velocidades relativas indica certa porcentagem de deslizamento.
Fase [1]: É a fase de aumento de pressão. O veículo e a roda se deslocam com a mesma velocidade V (tempo 0) quando é aplicado o freio. A pressão aumenta linearmente até o ponto [a]. Ao mesmo tempo, a velocidade da roda (VR) diminui mais rapidamente que a do veículo (Vv). Fase [2]: É a fase de manutenção da pressão. O sistema ABS entra em ação isolando a roda do resto do circuito hidráulico, evitando, assim, que a pressão aumente. Como resultado, a velocidade da roda tende a se estabilizar, mas, afastada ainda, daquela do veículo (ponto [b]). Esta diferença de velocidades relativas indica certa porcentagem de deslizamento.
Fase [3]: É a fase de redução da pressão; nela é aliviada a pressão do circuito hidráulico correspondente. Como resultado, a velocidade da roda começa a aumentar.
Fase [4]: É uma fase de manutenção da pressão, enquanto a velocidade da roda continua a aumentar aproximando-se daquela do veículo.
Fase [5]: Ao se igualarem ambas as velocidades (VR e VV), o sistema ABS permite o aumento da pressão hidráulica no circuito; como resultado, a velocidade da roda diminui.
Como se observa, os ciclos de Aumento-Manutenção-Diminuição da pressão se sucedem até que cessa a tendência ao deslizamento ou bloqueio da roda (ponto [c]).
Resumindo, as funções básicas do sistema ABS passivo consistem em:
1.Evitar o travamento das rodas durante o processo de frenagem.
2.Implementar a distribuição eletrônica da força de frenagem. Basicamente, a sua função é evitar a sobrepressão de frenagem e conseqüente travamento das rodas traseiras, antes mesmo da ação ABS.
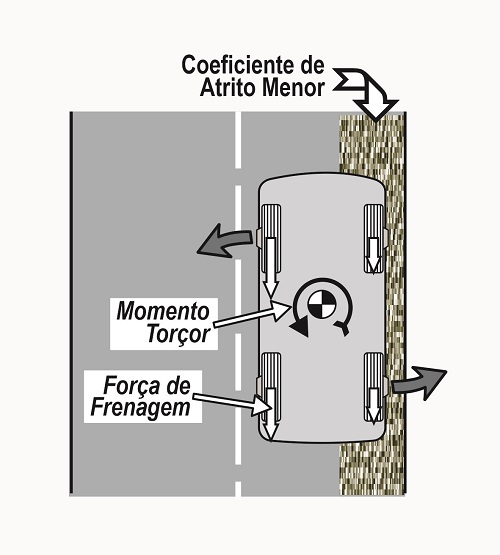
3.Compensar o momento torçor de guinada. Durante a frenagem sobre superfície com diferente coeficiente de atrito, as rodas em contato com o piso com maior coeficiente freiam com maior intensidade (diminuem a sua velocidade mais rapidamente) que as do lado oposto. Como mostra a figura abaixo, isto provoca o aparecimento de um momento torçor (torque de viragem) que faz o veículo girar em torno do eixo vertical e que o condutor pode não conseguir compensar na velocidade necessária, através do giro do volante. O sistema detecta esta situação com base na informação dos sensores de velocidade das rodas (verificando que as velocidades das rodas, de um e outro lado, são diferentes). Neste caso, a intervenção é no sentido de aumentar mais lentamente a pressão de frenagem nas rodas em contato com o piso com maior coeficiente de aderência, de forma a manter equilibradas as velocidades compensando, assim, o momento torçor. Ou seja, a pressão é controlada de forma a aplicar uma força de frenagem menor que a possível atrasando o aparecimento do momento torçor, o que implica num tempo maior de reação para o condutor. Como resultado, a distância de frenagem é aumentada em favor da estabilidade. Cabe ressaltar que este recurso não esteve disponível em todos os sistemas passivos. Atualmente, esta opção faz parte de todos os sistemas de estabilidade que utilizam o ABS ativo como principal recurso de ação
ABS Ativo Funcionamento
Alem de funcionar como ABS passivo, permite aplicar o freio de forma seletiva, sem a intervenção do condutor ou, em alguns casos, aumentar a pressão de frenagem em funções de assistência complementando, assim, a ação do condutor. O ABS ativo constitui a função principal do sistema de estabilidade. Basicamente, é utilizado pelo controle de estabilidade ESC, nos seguintes casos:
a)Para frear a (s) roda (s) de tração com tendência a patinar, sem a intervenção do condutor, durante as acelerações intensas (controle de tração). Função similar à desempenhada, em parte, pelo diferencial autoblocante.
b)Para frear a (s) roda (s) de tração durante o deslocamento sobre piso de baixa aderência ou de aderência diferente.
c)Para corrigir, de forma antecipada, uma situação que pode provocar instabilidade e/ou perda de dirigibilidade.
d)Para implementar a função de assistência à frenagem. Quando detectada uma situação de emergência durante a frenagem, e para complementar a ação do condutor, a pressão hidráulica é aumentada rapidamente ao nível de regulação ABS, com o que se reduz a distância de parada.
e)Para implementar funções auxiliares de assistência à condução; por exemplo, assistente de partida em aclive (pendente).
No sistema ABS ativo a modulação da pressão de frenagem é feita em 3 fases, como explicado anteriormente para o caso do ABS passivo: Aumento, manutenção e redução da pressão.
Mas, em função de que não há acionamento do pedal, durante o funcionamento como ABS ativo, o sistema deve possuir algum mecanismo próprio para aumentar a pressão.
Controle de Tração e o ABS
O controle de tração é aplicado em condições críticas de condução que acontecem durante as fases de:
1.Frenagem intensa.
2.Aceleração intensa ou mesmo durante uma aceleração normal em superfícies escorregadias como neve, gelo ou pista molhada, seja em reta ou curva. Em resumo, em toda situação em que as rodas motrizes tendem a patinar.
Para o ponto 1, a solução é o sistema antitravagem ou ABS.
Para o ponto 2, a solução é dada pelo sistema antipatinagem ou de controle de tração identificado com as siglas: TC (do inglês: “Traction Control” ou controle de tração), ASR (do inglês: "Anti Skid Regulation" ou regulação anti-patinagem) ou EDS (do inglês: "Electronic Differential System" ou sistema de diferencial eletrônico). Desta forma, surge a funcionalidade ABS/TC ou ABS/ASR que nada mais é que um sistema ABS ativo.
O efeito de patinagem aparece quando o torque produzido pelo motor supera o torque passível de ser transferido à pista pelas rodas de tração e transformado em aceleração.
O deslizamento depende, principalmente, das condições de aderência que apresente a pista com relação aos pneus das rodas de tração.
Portanto, a função do controle de tração é assegurar a estabilidade do veículo durante as acelerações ou em situações em que as rodas de tração estão em contato com piso com diferente grau de aderência.
A função do controle de tração é similar à realizada pelo diferencial autoblocante, que é a de bloquear a transmissão de torque a uma roda motriz que esteja patinando, para transferi-lo à outra roda motriz.
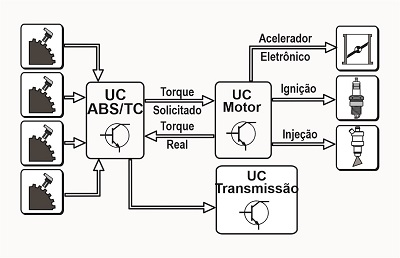
Em particular, o controle de tração tem como base a informação de velocidade recebida dos sensores de rotação e é realizado através de um conjunto de ações que incluem (fig. 3):
1.Controle do torque produzido pelo motor de forma a adequá-lo àquele passível de ser transferido ao piso, naquele momento.
Ciclo Otto
Controle da injeção: desativando convenientemente, os injetores;
Controle do avanço da ignição;
Controle eletrônico de torque; borboleta motorizada.
Ciclo Diesel
Controle da injeção: reduzindo a quantidade de combustível injetado.
2.Frenagem da (s) roda (s) de tração com tendência à patinação.
3.Adequando a relação de transmissão quando o veículo possui transmissão automática eletrônica.
A estratégia utilizada varia com o fabricante, mas pode se resumida no seguinte:
a)Ação sobre o freio: Se uma roda motriz patina, freia essa roda. Se as duas rodas patinam, primeiramente, freia as duas, mas, a seguir, e para evitar esforços térmicos, aplica as ações b), c) ou d):
b)Ação no motor sem borboleta motorizada: atrasa o ponto e suprime pulsos de injeção.
c)Ação no motor com borboleta motorizada (controle eletrônico de torque): fecha a borboleta e atrasa o ponto; em casos extremos pode suprimir ciclos de injeção.
d)Ação na transmissão automática: seleciona uma relação de transmissão mais baixa para diminuir o torque fornecido às rodas.
A ação sobre o motor complementa a ação sobre os freios com o fim de evitar esforços térmicos desnecessários nestes últimos.
Durante a fase de regulação antipatinagem, a pressão do sistema hidráulico de freio é limitada em 70 bar, aproximadamente.
Tempo de Reação
Um fator importante no controle de tração é o "tempo de reação" do sistema, ou seja, o intervalo de tempo entre a detecção da tendência à patinagem e a diminuição do torque.
Nesse sentido, o melhor resultado é obtido atuando simultaneamente, sobre o controle do motor e sobre o sistema de freio. Nos sistemas com controle de torque eletrônico (borboleta motorizada), em princípio, não seria necessário intervir na ignição ou injeção. No entanto, o ajuste do avanço e a supressão de ciclos de injeção contribuem na redução do tempo de reação.
Controle do Torque Reverso
Como resultado de uma mudança a uma marcha inferior ou ao soltar o acelerador em pista escorregadia, a ação de "freio-motor", provocada pelo torque reverso do motor, pode tornar excessivo o deslizamento das rodas motrizes. Nesta situação, abrindo a borboleta, aumenta levemente o torque gerado pelo motor, reduzindo assim, o efeito de frenagem sobre as rodas motrizes, a um nível adequado à estabilidade do veículo.