Muitos reparos eletrônicos no dia a dia da reparação automotiva são feitos por “tentativa e erro”, o que muitas vezes acarreta troca desnecessária de peças. Isso gera aumento de tempo para o reparo final do veículo e causa perda total de assertividade na causa original da falha. É importante dominar bem a arquitetura interna de uma ECU (Unidade de Controle Eletrônica) para recuperar esse tempo e precisão nos diagnósticos e reparos.
Nesta série, estamos abordando em cada artigo uma parte da arquitetura interna do hardware da ECU. Já abordamos alimentação, entradas de sensores, comandos para atuadores e amplificação de tensões. Agora, vamos abordar o último Bloco de funcionamento – comunicações.
Esperamos que essa série de artigos te ajude a ter um bom início nesse mercado em ascensão e a descobrir o caminho para se tornar uma referência no nele. O módulo que usaremos como base de nossas explicações será o sistema Diesel pesado EMS S6 PDE.
.jpg)
Revisando a arquitetura de hardware de um módulo Diesel - Conforme consideramos no primeiro artigo dessa série, veja a seguir os principais circuitos que você encontrará em um módulo de injeção Diesel:
• Circuito de Alimentação;
• Circuito de entrada e processamento de sinais;
• Circuito para comando de atuadores;
• Circuito de amplificação e armazenamento de tensões;
• Circuito de comunicação (Rede CAN e K).
Neste artigo focaremos no circuito de comunicação CAN entre módulos e seus componentes principais. Também veremos um dos testes feitos neste circuito, durante uma rotina de trabalho de um reparador de módulos.
.jpg)
A rede de comunicação CAN - A linha de comunicação CAN é utilizada na comunicação entre os diversos módulos do veículo. Com o desenvolvimento da CAN, é possível que vários módulos se comuniquem entre si, inserindo em uma rede comum informações que cada um recebeu de seus respectivos sensores e periféricos, para que todos os módulos possam ter acesso a essas informações se forem necessárias a eles. A linha CAN funciona com o princípio “Multimaster”, no qual todas as unidades eletrônicas agem como mestres e podem adicionar ou coletar informações da rede de acordo com sua prioridade e utilidade.
.jpg)
A rede de comunicação CAN é composta por dois fios trançados com o objetivo de que ambas as linhas recebam as mesmas interferências externas, possibilitando assim uma comparação correta por parte do processador para validar as informações emitidas ou recebidas. Esses dois fios são denominados CAN H (High) de nível lógico alto e a CAN L (Low) de nível lógico baixo. Quando a rede está ativa, temos todas as informações já trafegando em ambas as linhas de maneira bidirecional, ou seja, tanto high quanto low tem pacotes de dados saindo e entrando dos diversos módulos da rede.
O que define a velocidade dos pacotes de dados na rede, as prioridades desses sinais e os tamanhos de cada pacote de dados é o Protocolo da rede. Diferentes protocolos podem ser usados em um sistema dependendo de qual a aplicação da rede (levando em conta que mais de uma rede pode estar em atividade simultaneamente no mesmo veículo).
.jpg)
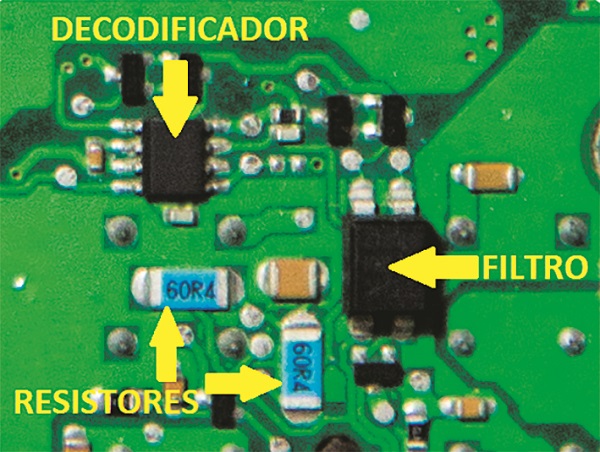
Como identificar o circuito de Comunicação CAN - Para nos ajudar a localizar esse circuito precisamos ter em mente as funções que ele deve exercer. Esse circuito tem três objetivos: (1) filtrar possíveis interferências no sinal, (2) fechar adequadamente o circuito de comunicação (em alguns sistemas isso ocorre no próprio chicote) e (3) decodificar a comunicação para o microcontrolador da ECU.
Portanto, para que possamos localizar com um multímetro os componentes desse circuito, vamos procurar com a técnica de mapeamento componentes relacionados com essas três funções principais. Vale lembrar também que essas três funções marcam a sequência padrão dos circuitos de comunicação CAN em qualquer sistema ou ECU
Componente Filtro da rede - Este importante componente inicia o circuito de comunicação CAN. É um componente de fácil identificação visual devido ao seu encapsulamento específico. Dentro desse componente existem basicamente duas pequenas bobinas, uma para cada linha de comunicação, com o objetivo de estabilizar as linhas de tensão, filtrando assim possíveis ruídos do sinal.
.jpg)
Um teste de amostragem em um circuito de rede CAN em bancada, para verificar a presença correta de High e Low bem como o espelhamento de confirmação dos pacotes de dados, geralmente realizado no componente filtro de Rede.
.jpg)
Resistências da rede - Para que seja possível que pacotes de dados em forma de sinais digitais (níveis de tensão em máximo e mínimo) percorram toda a rede, é necessário fechar esse circuito, para que haja corrente. Calculado com base nos níveis de tensão da CAN e com base nas velocidades possíveis dos pacotes de dados, um valor de resistência padrão foi estabelecido para essas redes – 120 Ohms. Uma das análises possíveis para diagnosticar rompimento da rede ou problemas no chicote é a medição dos valores de resistência dessa rede.
Em situações normais, medindo em um dos módulos em paralelo a rede e com todos os módulos da rede conectados, devemos encontrar 60 Ohms. Isso ocorre devido à Lei de Ohm, que indica: quando resistências estão em paralelo uma à outra devemos dividir o valor de resistência. Na rede fechada, com os módulos conectados temos uma resistência de 120 Ohms em cada ponta da rede. Desta forma, 120 Ohms divididos entre duas resistências nos dá o valor de 60 Ohms (indicando que a rede está fisicamente íntegra). Essa resistência pode estar dentro do circuito da ECU ou no chicote, variando de sistema para sistema.
.jpg)
C.I. Decodificador da comunicação - Para que seja possível transmitir as informações da rede por apenas dois fios de maneira bidirecional em cada um deles, as informações precisam ser em forma de códigos binários, sendo um bit a unidade mínima de informação que pode ter o valor de 0 ou 1. Para que códigos binários sejam transmitidos por um fio elétrico eles devem ter um valor em tensão. Realizar essa conversão é a função do decodificador de CAN.
Este C.I. (circuito integrado) é o componente mais importante do circuito de CAN e é a fonte da maior parte dos problemas de comunicação relacionados à ECU. Ele não trabalha como um conversor, pois os sinais de CAN já chegam até a ECU em forma digital, não sendo necessária uma conversão. Porém, os níveis de tensão são incompatíveis com o trabalho do circuito lógico (processador e memórias). O circuito lógico trabalha com sinais digitais de 5V, que para tais componentes, significam 0 e 1, linguagem binária, convertida em informações úteis.
.jpg)
Portanto, para que a comunicação da rede seja possível, cada módulo eletrônico da rede possui um C.I. decodificador que trabalha de maneira bidirecional, convertendo os valores baixos de tensão da rede (2V – 4V) para valores maiores (5V) e convertendo as informações que o processador visa compartilhar de tensões maiores (5V) para tensões de trabalho externo da rede (2V – 4V).